
Academic Projects
These projects were for academic courses over my time at Worcester Polytechnic Institute.




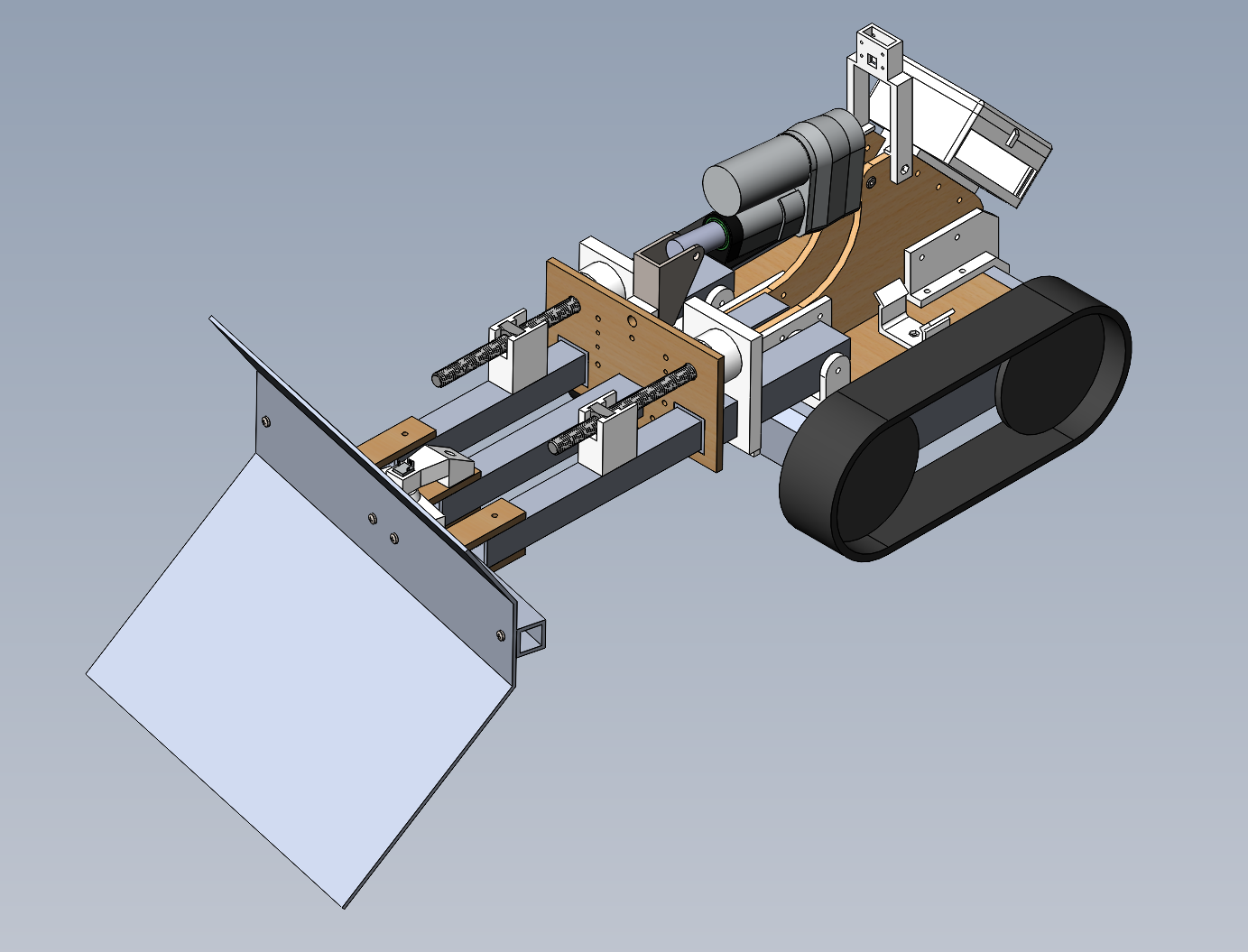
WPI Major Qualifying Project - Wildland Firefighting robot
Design and construction of a robot for the purpose of indirect fireline construction. Since I am currently working on this project, check back later for the full report or contact me for more information!
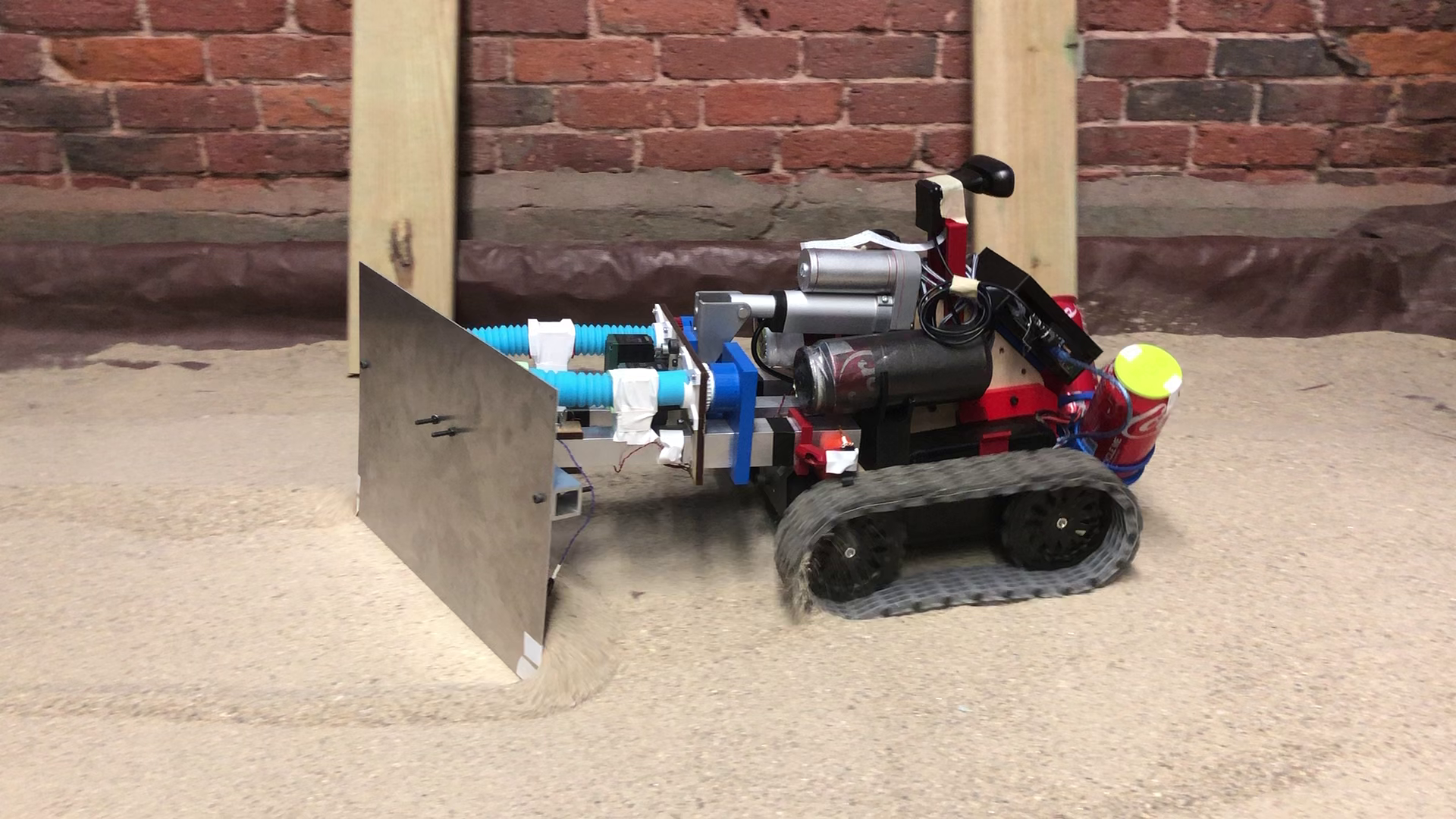
The demonstration video for our completed robot, Fire Goat (FiGo).

WPI Interactive Qualifying Project - Use of Hong Kong’s Public space post-covid
Analysis of the negative holistic health impacts of COVID-19 mitigation measures and the creative use of public space to heal from those impacts.

ME 4815 Industrial robotics
This course used RobotStudio to simulate and program an ABB 1600 six DoF robot manipulator to palletize cubes and create stacks of blocks. While this course reviewed the kinematics from RBE 3001, it also focused more on the orientation of the end effector.

ME 3901 Hybrid Solar-Compressed Air Home Power System
Using customer energy data and Worcester housing sizes, designed a hypothetical solar-compressed air power system for a Worcester apartment. This included solar irradiance data, energy demand, compressor design, tank design, thermal and pipe losses, and practical considerations.

CS 3733 Software Engineer Application
With a team of 11 Computer Science and Robotics Engineering students, we created a hospital kiosk application to assist visitors, employees, patients, and administrators in navigation, service requests, and COVID information. Feel free to contact me to demonstrate the application.

RBE 3002 Unified Robotics IV Final Project
A Turtlebot used LiDAR and ROS nodes to map and navigate a maze. ROS nodes were programmed in Python and included Gazebo simulation and Turtlebot nodes, allowing simulation and the physical robot to work simultaneously. Additional concepts included Monte Carlo localization, filters, and locomotion.

RBE 3001 Unified Robotics III Final Project
A 3 degree of freedom serial robot that uses basic image processing, forward and inverse kinematics, forward and inverse differential kinematics, and Matlab to identify, pick up and place different color objects.
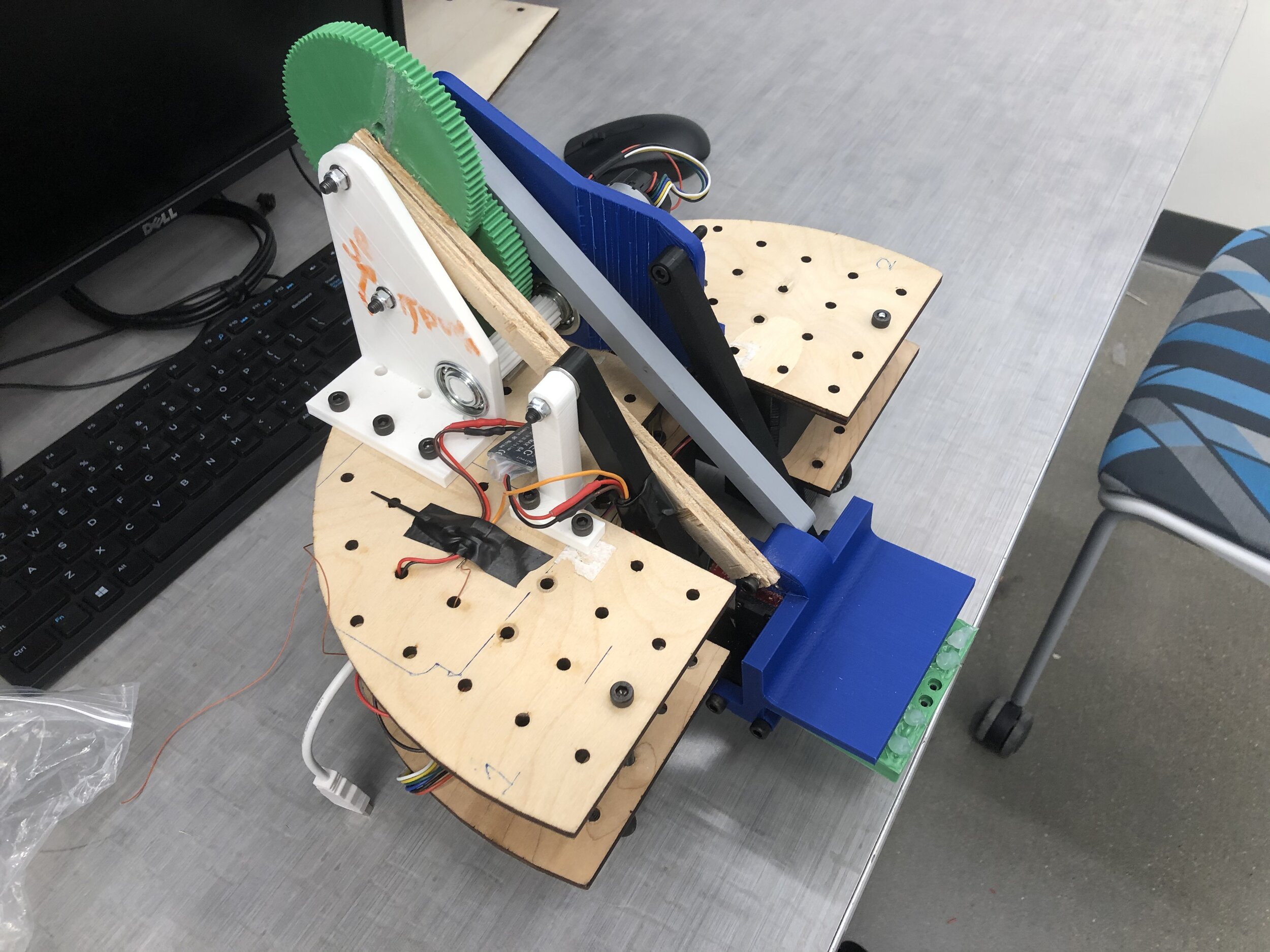

RBE 2001 Unified Robotics I Final Project
A robot designed to pick up and place plates of different materials onto locations at different angles. Utilized Solidworks, 3D printing, an arduino programmed in C++, state machines and PID control.

RBE 1001 Introduction final project
A robot designed to move wooden plates to different heights while navigating autonomously across a field. Utilized VEX kit parts, custom line follower circuits, kinematics, C++ and a state machine.